海洋渔业农牧化是现代海洋渔业发展的趋势,也是修复和保护近海生态环境及恢复渔业资源的重要措施之一。海洋牧场的环境监测主要有声学和光学两种方式,其中水下环境监测一般利用水声,而在人工鱼礁修复生态环境过程和内在机理研究方面,一般采用潜水后进行普通水下摄像,但该方法观测时间较短,且由于光学测量为C模式测量(空间信号转变为平面信号),较难反映出鱼礁附近海洋生物的动态变化过程。
伴随着近代计算机科学和数字摄影技术及图像处理技术的高速发展,水下数字近景摄影测量技术开始被逐渐应用于鱼类行为、水产养殖和海洋牧场等研究领域中。在以往的鱼类行为研究中,为获取鱼的几何尺寸和体质量参数,常使用的方式是将鱼捕捞上来,在现场或带回实验室中进行测量[1]。这种传统的测量方式属于接触式测量,或多或少会影响试验进展,甚至减少试验鱼数量。与传统的测量方式相比,数字近景摄影测量技术通过对由数字摄像机 (CCD或CMOS)提取的近距离目标的影像进行测量[2],以测定目标在三维空间的位置、形状、大小乃至目标的运动,属于非接触式测量,该方式不会对鱼产生伤害,且具有准实时甚至是实时测量的优点。
近年来,国外在鱼类相关的研究中常用到数字近景摄影测量方法,如鱼类栖息场调查,鱼的几何信息 (位置、大小和形状等)和游泳速度的测量,以及生物量评估等[3-5]。但在国内,数字摄影测量技术在鱼类行为相关研究中却未见应用。为此,本研究在范亚兵等[6]研究的水下摄影测量装置的基础上,尝试开发了一套能够适用于人工鱼礁的水下立体光学监测系统,此系统主要由两架水下摄像机构成,摄影图像储存至嵌入式数字硬盘录像机,并能够在显示器中实时播放[7]。该系统除进行传统意义上的光学监视之外,还能够从两架摄像机获取的同一鱼体的图像信息反演出鱼的体长、空间内的姿态倾角、游动速度、洄游时间和昼夜变化等参量,达到明确人工鱼礁附近生态环境变化的目的[8]。另外,利用声学仪器如科学鱼探仪对人工鱼礁附近进行水下监测时,目标强度与鱼的物种、体长和相对于传感器的方位等参量相关,这些参量的反演对科学鱼探仪进行定量声学评估也非常有价值[9]。
本研究中,介绍了水下摄像机的标定方法及此系统水下摄像机的标定结论,利用此系统在实验室对大泷六线鱼Hexagrammos otakii进行了试验,分析了系统对鱼体几何长度 (尾叉长)的测量精度,旨在研究水下摄影测量技术测量鱼类体长的可行性。
1 材料与方法
1.1 标定方法
摄影测量的基本原理是对由摄像机提取的图像(二维)进行测量,测定物体在三维空间的位置、形状、大小乃至物体的运动[10]。空间物体表面某点的三维几何位置与其在图像中对应点间的相互关系是由摄像机的几何和光学参数以及摄像机与空间物体的位置关系共同决定的[11]。摄像机标定就是确定摄像机的几何与光学参数 (内部参数)和/或摄像机坐标系相对于世界坐标系的位置与方位(外部参数)的过程[12]。
如图1所示,假设空间中某点P(本研究中用粗体表示矢量)在世界坐标系 (O-XYZ)中的坐标为 [XC,YC,ZC],按照针孔模型投影原理,P点在摄像机坐标系 (o-xyz)的投影点坐标为 [xn,yn,0],描述世界坐标系与摄像机坐标系投影关系的参数一般称为外部参数。
考虑到摄像机的镜头畸变,经镜头畸变后的P点投影点坐标会发生偏移,将实际投影点坐标记为[xd,yd,0]。由于在图像坐标系中 (图1中uv坐标系)一般以图像的左上角为坐标原点,单位为像素,因此,在摄像机获取的图像中,实际投影点坐标 [xd,yd,0]在图像坐标系中的坐标为 [ud,vd]。描述图像坐标系与摄像机坐标系的参数一般称为内部参数。
水下摄影测量系统的三维重建精度在较大程度上取决于摄像机标定的准确度[13]。考虑到水下摄像机由于光线在水、玻璃与空气间复杂的折射关系会产生较大的畸变,在三维重建过程中,通过水下摄像机获取的目标图像特征点需根据摄像机的内部参数[14-15]进行调整,使校正后的目标在三维重建[16-17]后达到更高的精度。因此,本节主要描述测量系统中水下摄像机内部参数的标定过程和结论,并对基于非线性摄像机内部参数标定的摄影测量系统的三维重建精度进行分析。
本研究中,采用了由Jean-Yves Bougue博士公开发布的 Matlab摄像机标定工具箱 (http://www.vision.caltech.edu/bouguetj/index.html)对摄像机的内部参数进行标定。此工具箱使用以下4个参量来描述摄像机的内部参数:
(1)焦距。用一个1行2列的向量表示,即fc=[fc(1),fc(2)],fc(1)和fc(2)分别代表x和y方向的焦距,单位为像素。比值fc(1)/fc(2)也称之为纵横比,如果数字摄像机 (CCD)阵列中像素不是正方形,则比值不等于1。
(2)主点位置。用一个1行2列的向量表示,即cc=[cc(1),cc(2)],cc(1)和cc(2)分别代表图像中x和y方向的中心位置,单位为像素。
(3)倾斜角。定义成像传感器 (如CCD)的x方向和y方向之间的夹角,用一个标量表示,alpha_ c, 单位为 (°)。
(4)镜头畸变系数。用一个1行5列的向量表示, kc=[kc(1), kc(2), kc(3), kc(4), kc(5)],其中第一、第二和第五项代表镜头的径向畸变系数,第五项畸变系数根据迭代效果,选择保留还是舍弃,因为每个畸变系数都有一个误差范围,如果计算的畸变系数误差范围比系数本身要大,说明算法不稳定,就舍弃6阶的径向畸变,也就是kc(5)。第三和第四项代表了镜头的切向畸变系数。
1.2 摄像机内部参数标定结论
本研究中使用的水下摄像机由摄像机和密封外壳两部分组成,其中摄像机采用的是深圳翔飞SF-205G型摄像机。摄像机的镜头为6 mm到12 mm的变焦镜头,试验中为了尽量增加视野,采用最小焦距,约为6 mm。
摄像机的标定过程需要用到标定块,本研究中使用的标定块外型如图2所示,标定块为正方体,边长为50 cm,其中的一面未密封以便在水槽中使用。由于标定工具箱针对的是棋盘式平面网格的标定块,因此,只需要标定块的一个面,其表面上每个小块的尺寸为5 cm×5 cm。
按照Matlab摄像机标定工具箱的操作流程,本研究中对3种试验环境下的摄像机内部参数进行了标定。摄像机在空气中的标定结果、摄像机置于密封壳后在空气中的标定结果和摄像机置于密封壳后在实验室水槽中 (海水)的标定结果,如表1、表2和表3所示。其中,3次试验的综合畸变 (包括径向和切向)模型如图3、图4和图5所示。通过3次标定的试验结果对比可知:
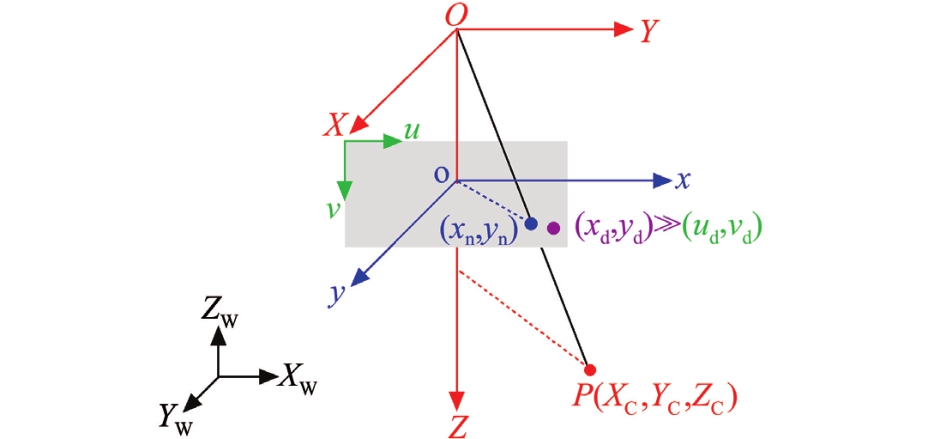
图1 考虑镜头畸变的小孔成像摄像机模型
Fig.1 Pinhole camera model when the lens distortion is considered
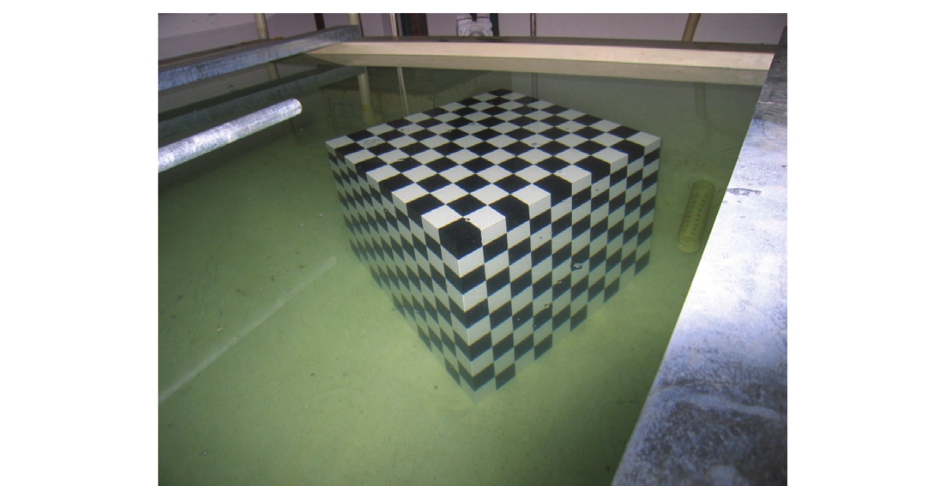
图2 本研究中所使用的标定块
Fig.2 Calibration block used in present study
表1 摄像机在空气中的内部参数标定结果
Tab.1 Calibration of the intrinsic camera parameters
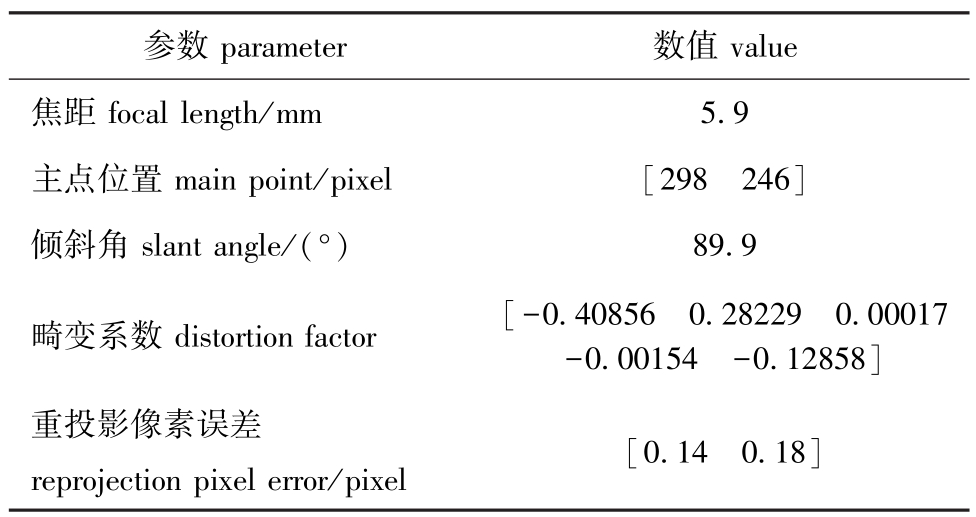
参数parameter 数值value焦距focal length/mm 5.9主点位置 main point/pixel [298 246]倾斜角 slant angle/(°) 89.9畸变系数 distortion factor [-0.40856 0.28229 0.00017-0.00154 -0.12858]重投影像素误差reprojection pixel error/pixel [0.14 0.18]
表2 摄像机置于密封壳后在空气中的内部参数标定结果
Tab.2 Calibration of the intrinsic parameters when the camera is placed in a sealed shell under air condition
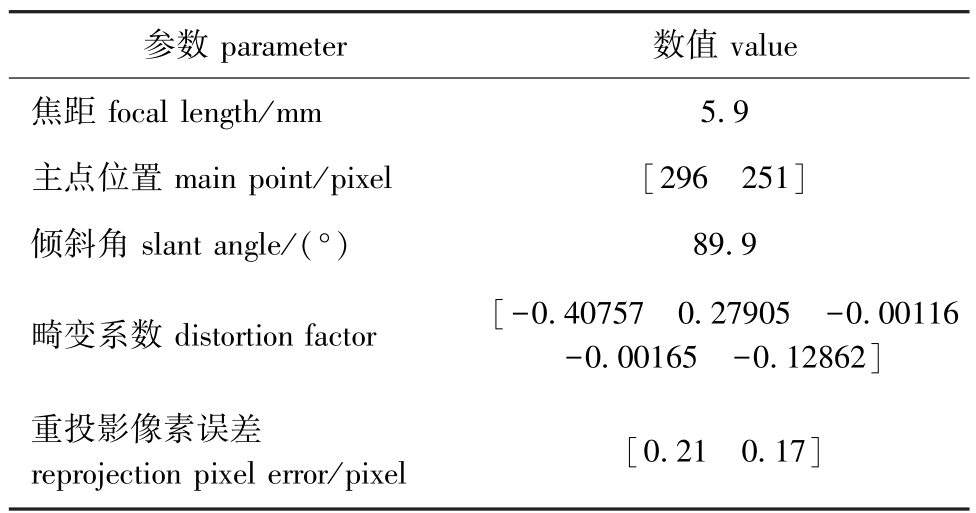
参数parameter 数值value焦距focal length/mm 5.9主点位置 main point/pixel [296 251]倾斜角 slant angle/(°) 89.9畸变系数 distortion factor [-0.40757 0.27905 -0.00116-0.00165 -0.12862]重投影像素误差reprojection pixel error/pixel [0.21 0.17]
(1)焦距。在空气中,两次标定焦距不变;在水槽中,由于光线在水中的折射率约为空气的1.3倍,同一摄像机在水下时的焦距变长 (约为1.35倍),从而使得视野变小,这也是水下摄像机一般采用短焦镜头的原因。
表3 摄像机置于密封壳后在水中的内部参数标定结果
Tab.3 Calibration of the intrinsic parameters when the camera is placed in a sealed shell under water condition
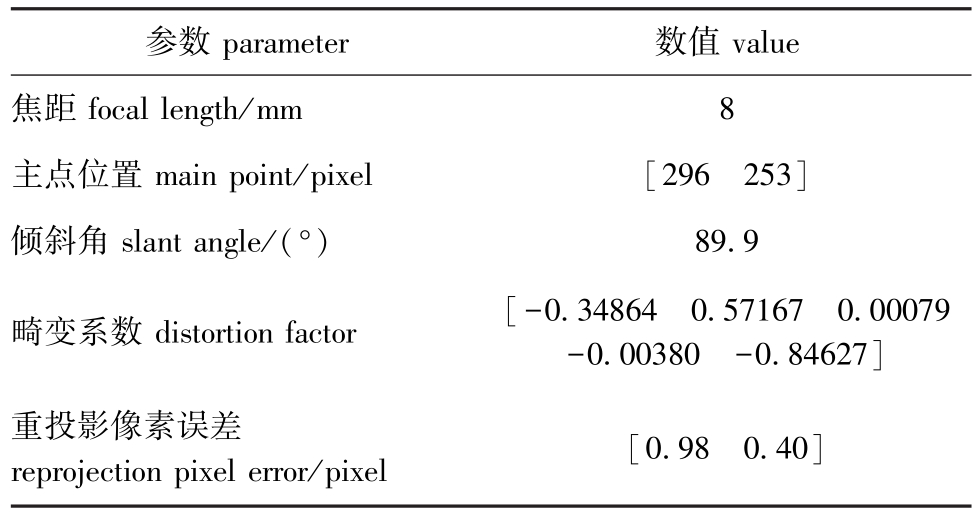
参数parameter 数值value焦距focal length/mm 8主点位置 main point/pixel [296 253]倾斜角 slant angle/(°) 89.9畸变系数 distortion factor [-0.34864 0.57167 0.00079-0.00380 -0.84627]重投影像素误差reprojection pixel error/pixel [0.98 0.40]
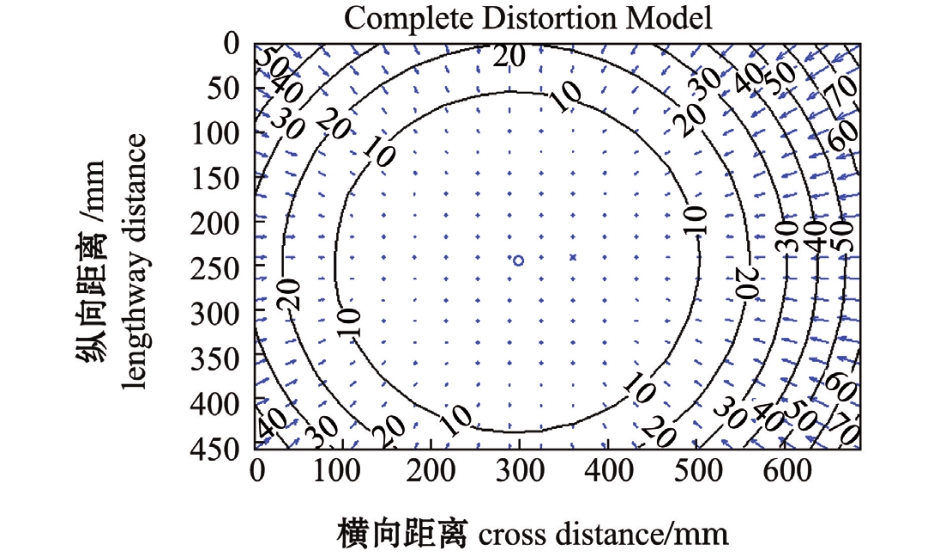
图3 摄像机在空气中的综合畸变
Fig.3 Complete distortion of the camera in the air
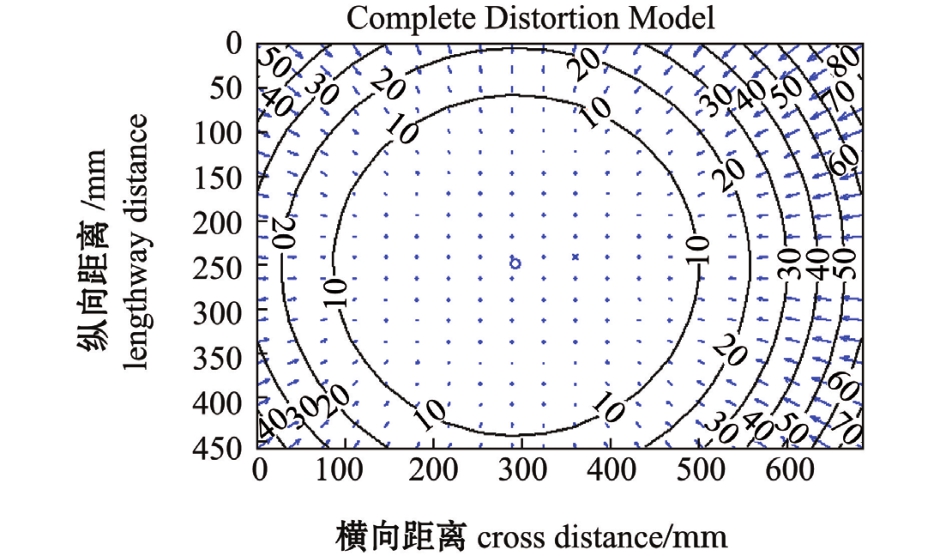
图4 摄像机置于密封壳后在空气中的综合畸变
Fig.4 Complete distortion of the camera which is placed in a sealed shell in the air
(2)主点位置。3次标定试验的主点位置 (图中的圆圈)几乎一致,均相位于图片的中心位置(图中的叉号)发生了明显偏移,这主要是由于摄像机的设计不完美引起的,如CCD传感器的中心位置与镜头光轴不重合或镜头制造的缺陷。
(3)倾斜角。3次标定试验的结论相同,说明本研究中采用的摄像机CCD传感器设计较为合理,传感器阵列水平和垂直方向的夹角接近90°。

图5 摄像机置于密封壳后在水槽中的综合畸变
Fig.5 Complete distortion of the camera which is
placed in a sealed shell in a water tank
(4)畸变系数。在空气中,摄像机置于密封壳的前后畸变模型稍有变动,但由于主点位置相对于图像中心明显向左偏,使得摄像机图像中右侧部分的畸变较大;在水槽中,畸变系数发生了明显的变动,这种变动主要是由于光线在水、玻璃和空气3种介质中折射系数的不同而引起的。需要注意的是,图5中像素的畸变位移与图3、图4相比较小(最大值约40像素),这是由于镜头在水槽中焦距变长导致的,并不代表水中图像的畸变较小。
(5)重投影像素误差。重投影像素误差用于衡量标定结果的精确度。在空气中,尽管由于密封壳做工不完美造成了一定的主点偏差和畸变系数变化,但是重投影像素误差变化不大,仅为0.2个像素左右;在水槽中,重投影像素误差明显增加,约1个像素,这也是水下摄影测量的精度要低于在陆地应用时的一个主要原因。
1.3 水下摄影测量系统的三维重建精度检验
三维重建是指通过空间中某点在图片中的投影坐标计算其在世界坐标系中的三维坐标 (图1)。由于图像为二维平面,故投影点坐标为二维向量,由二维向量计算三维坐标的过程实际上是属于欠定方程组的求解范畴。因此,一般通过多个摄像机对同一目标进行拍摄,通过同一控制点在多幅同步图像中的坐标求解其世界坐标,即将欠定方程组转化为超定方程组。本研究中的水下摄影测量系统由两架摄像机构成,通过双目立体视觉进行三维重建。
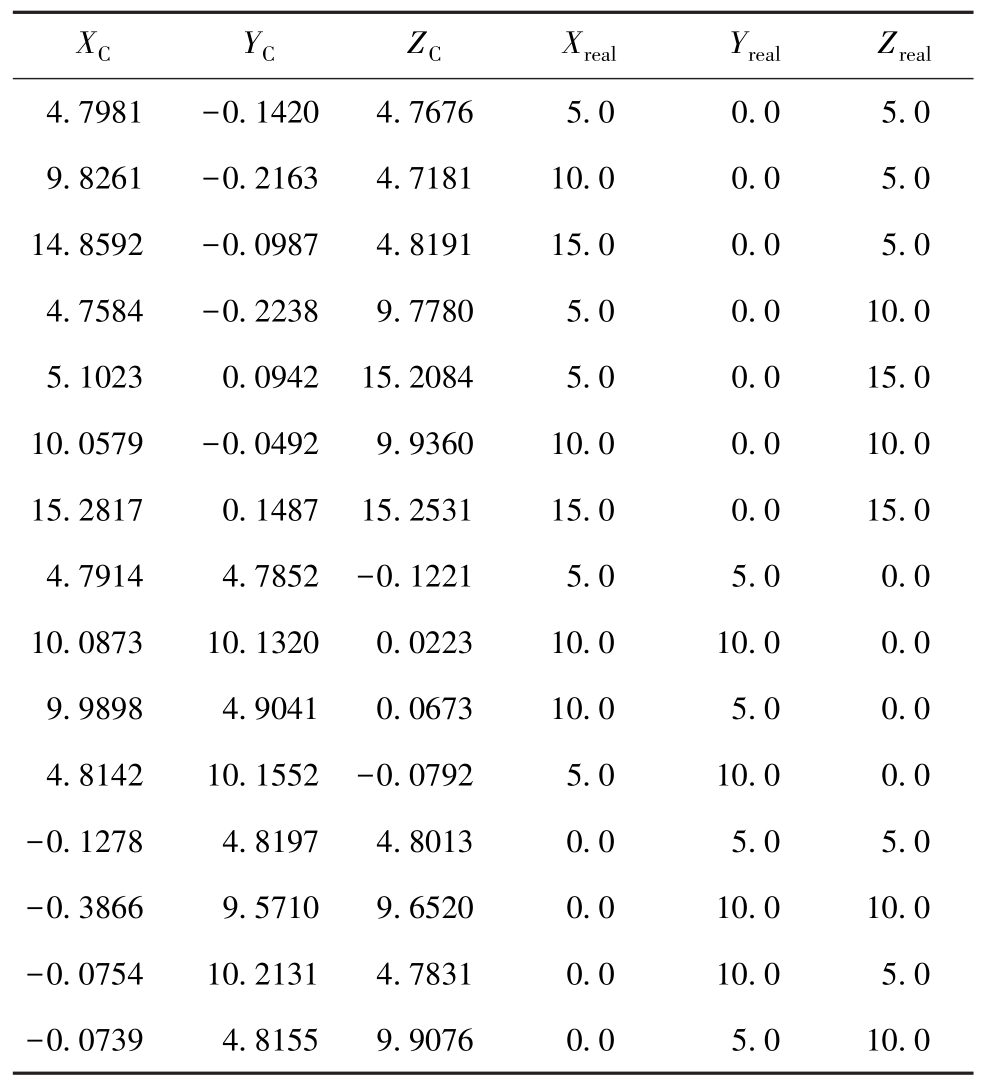
随机在标定块上选取15个控制点,通过这15个控制点在两架摄像机图像中的坐标计算其世界坐标,结论如表4所示。需要注意的是,由于世界坐标系选取的任意性,控制点在世界坐标系中的坐标并无实际意义,对于控制点的三维重建主要用于计算各点之间的距离。
由于本研究所测量的为近景,为了使系统更加小巧,两摄像机的基线长度较短,且在试验中采用的CCD摄像机作为价格低廉的非量测摄像机,摄像机参数未知或不稳定,从而导致成像过程不稳定,数字化图像分辨率也较低,存在量化误差和镜头的非线性畸变,从而使系统计算误差较大。其中,x方向平均绝对值偏差为2.0 mm,最大绝对值偏差为3.9 mm;y方向平均绝对值偏差为2.2 mm,最大绝对值偏差为4.3 mm;z方向平均绝对值偏差为2.2 mm,最大绝对值偏差为3.5 mm。总体而言,平均绝对值偏差为2.1 mm,标准差为1.2 mm,完全可以满足鱼体长度测量的精度要求。
表4 15个控制点的真实坐标与三维重建坐标对比
Tab.4 Comparison of the real cordinates with the three dimensional reconstructed coordinates at 15 control points cm
XC YC ZC Xreal Yreal Zreal 4.7981 -0.1420 4.7676 5.0 0.0 5.0 9.8261 -0.2163 4.7181 10.0 0.0 5.0 14.8592 -0.0987 4.8191 15.0 0.0 5.0 4.7584 -0.2238 9.7780 5.0 0.0 10.0 5.1023 0.0942 15.2084 5.0 0.0 15.0 10.0579 -0.0492 9.9360 10.0 0.0 10.0 15.2817 0.1487 15.2531 15.0 0.0 15.0 4.7914 4.7852 -0.1221 5.0 5.0 0.0 10.0873 10.1320 0.0223 10.0 10.0 0.0 9.9898 4.9041 0.0673 10.0 5.0 0.0 4.8142 10.1552 -0.0792 5.0 10.0 0.0-0.1278 4.8197 4.8013 0.0 5.0 5.0-0.3866 9.5710 9.6520 0.0 10.0 10.0-0.0754 10.2131 4.7831 0.0 10.0 5.0-0.0739 4.8155 9.9076 0.0 5.0 10.0
2 结果与分析
在较大范围内,鱼群的分布在洄游过程或起水时的群体形态各不相同[2]。在透明度高、能见度高的水域里,利用水下摄影测量系统对鱼体体长、姿态等参数进行测量是可行的,可以用于研究鱼群的分布及结构,鱼体个体的体长及其他体貌特征的细节。在浅水海域,可以由潜水员携带水下摄影设备,对鱼群以及鱼体个体进行观察摄影。在深水海域,可采用安装水下摄影设备的遥控摇曳或自航式运载装置进行连续观察摄影。
本研究的主要目的是探讨利用水下摄影测量系统进行鱼类体长测量的可行性。在各类鱼体体貌的特征参量中,体长是最为直观的一个物理量,也是鱼类重要的生物学特征,不仅是分类依据,还是评价鱼类生长特性和进行遗传评估的重要指标[18]。因此,本研究中首先在实验室中利用摄影测量系统对大泷六线鱼的体长进行了测量,并与现场测量结果进行了对比。
目前,对体长的分类主要有3种方式:① 鱼类吻端至测线鳞的最后一枚鳞片末端;②鱼类吻端至脊椎骨末端;③鱼类吻端至尾鳍基部。
一般而言,对于尾叉较为明显的鱼类,尾叉长可以在图像中较为直观的提取出来,但是对于尾叉不明显的鱼类,则可以提取全长。
本研究中使用了15尾大泷六线鱼,对其尾叉长进行了测量。
2.1 鱼体模型控制点的提取
利用几何形态测量法,首先设定鱼类外部控制点 (图6),每张鱼体照片根据参考鱼体轮廓图片各提取17个参考点 (图7)。本研究中对大泷六线鱼长度的测量方式是取吻端控制点到尾部3个控制点距离的平均值,作为体长的全长。

图6 大泷六线鱼的身体轮廓控制点
Fig.6 Control points of body contour in fat greenling Hexagrammos otakii
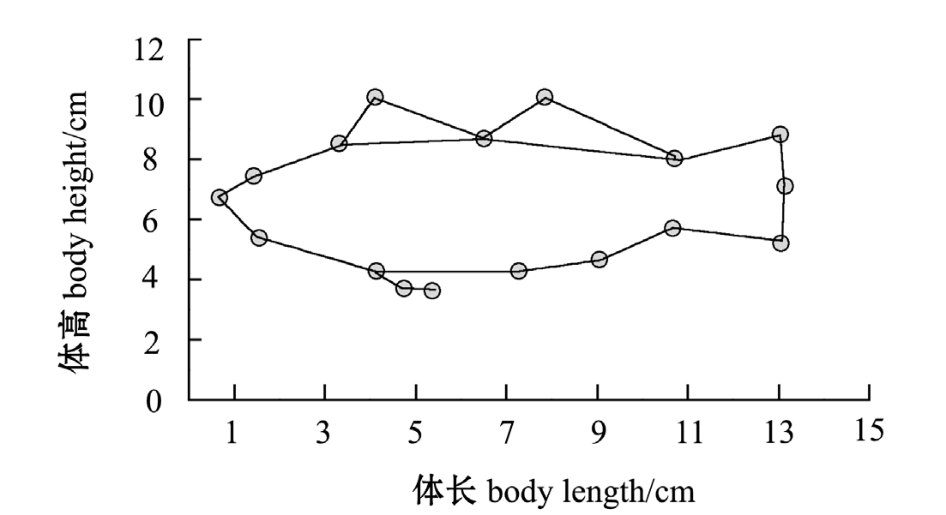
图7 鱼体轮廓近似几何控制点
Fig.7 Approximate control points of body contour in
fat greenling Hexagrammos otakii
2.2 水下摄影系统测量鱼体体长的精度分析
根据各个控制点在两架摄像机同步图片中的图像坐标,对其进行三维重建,获得各个控制点的世界坐标。然后结合数据图像的曲度进行分析[19-20],最后计算得到摄影图像中每条鱼的体长结果。
对15尾试验鱼进行水下摄影测量后,将其取出进行现场体长测量,然后对两种测量方式的结果进行对比。表5为15尾大泷六线鱼水下摄影测量长度与对应的实际测量长度结果。摄影测量计算得到的体长平均值为18.11 cm,标准偏差为4.18 cm;人工测量得到的体长平均值为16.83 cm,标准偏差为4.31 cm。两者的差异显著性使用SPSS软件双因素检测进行了检验,相关性系数为0.933(P=0.003);15组数据中最大相对误差为18.1%,最小相对误差仅为2.1%。
表5 摄影测量与人工测量的鱼体体长对比
Tab.5 Comparison of the photogrammetric body length and manual measurement of body length
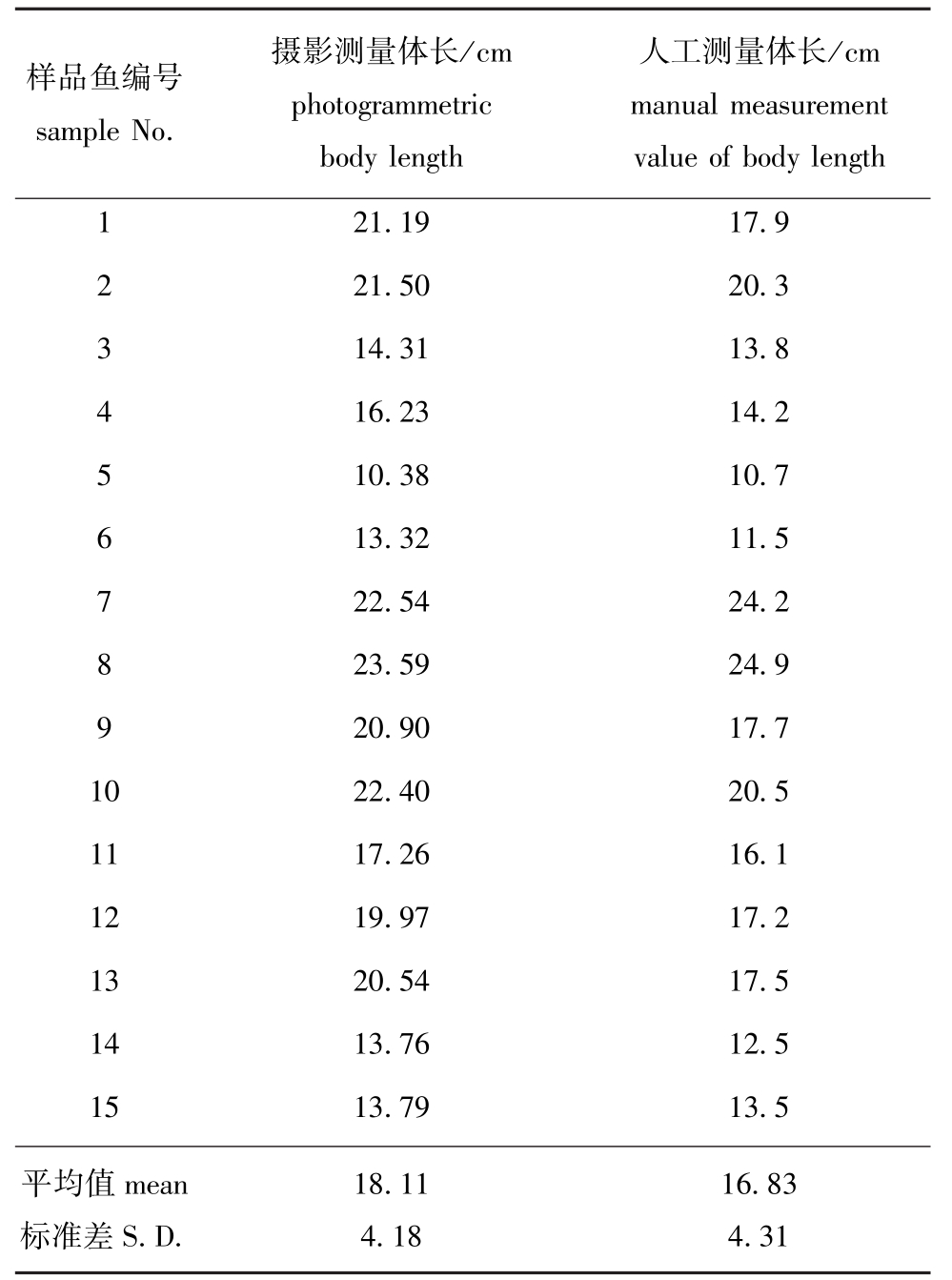
样品鱼编号sample No.摄影测量体长/cm photogrammetric body length人工测量体长/cm manual measurement value of body length 17.9 20.3 13.8 14.2 10.7 11.5 24.2 24.9 17.7 20.5 16.1 17.2 17.5 12.5 13.5平均值mean标准差S.D.1 2 3 4 5 6 7 8 9 1 0 11 12 13 14 15 21.19 21.50 14.31 16.23 10.38 13.32 22.54 23.59 20.90 22.40 17.26 19.97 20.54 13.76 13.79 18.11 4.18 16.83 4.31
本试验结果表明,摄影测量获得的鱼体体长与人工测量值之间存在约2 cm的系统偏差,这可能是由测量方式造成的,在本研究中人工测量的鱼体体长为鱼死亡后的长度。标准偏差两者均约为4 cm,结论较为一致。与 “1.3”节对于标定块控制点的三维重建结论相对比,鱼体长度测量的相对误差明显增大。
如图8所示,两种测量方式的绝对值偏差与鱼体长度无关,这可能与鱼体在游泳时身体的几何弯曲或鱼在摄像机视野中的位置有关。
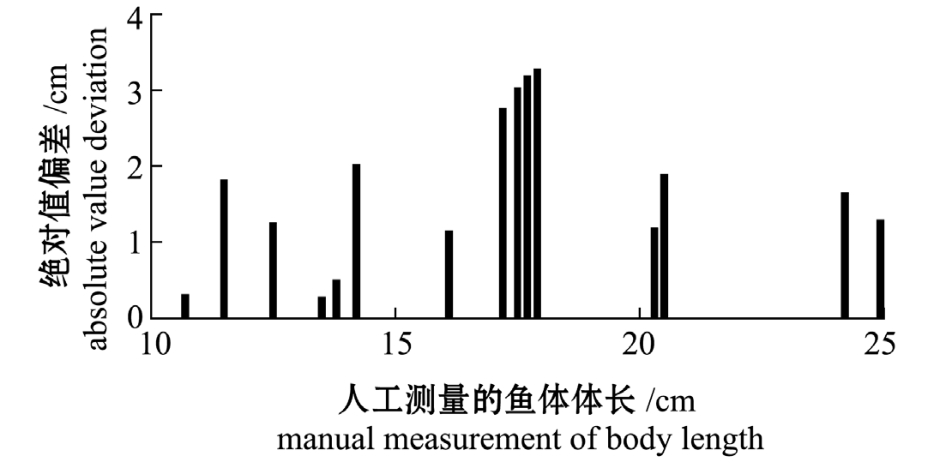
图8 人工测量体长的误差
Fig.8 Errors in manually measured body length
3 讨论
3.1 水下摄影测量准确性
摄影测量是一种非接触式的测量方式,并且摄影测量系统本身可以对鱼类进行水下监控,非常适合于鱼类行为学相关研究[21-22],研究结论对于评估海洋牧场效果及科学管理牧场均具有重要作用。
由于专业的水下摄影测量设备非常昂贵,本研究中采用的是目前市场上的普通摄像机,将两架摄像机分别装置在自制的密封壳中以实现水下测量的目的。摄像机的定标结果表明,摄像机本身的畸变比较严重,并出现了明显的光心偏心 (图3)。摄像机密封壳外的玻璃罩对摄像机成像的影响较小(图4),但是在水下环境中,由于水的折射率较大,使得焦距变长,畸变系统变大 (图5)。在水下对本研究中使用的摄影测量系统进行三维重建精度检验,标定后的摄影测量系统的三维重建结论表明,摄影测量计算得到的标定块的控制点坐标与实际坐标的平均绝对值偏差为2.1 mm,标准差为1.2 mm,完全可以满足鱼体长度测量的精度要求。
3.2 水下摄影测量误差来源
本试验中在水槽中利用摄影测量系统对15尾大泷六线鱼的体长进行了测量,并将结论与人工测量值进行了对比。在过去的研究中发现,对目标体长较小的鱼类,测量的结果误差会大一些。引起误差的原因有两个因素:第一是摄影机在摄影中出现的误差,主要由电子元件引起,也会存在其他因素,例如当时的环境条件 (如光照不足或过于充足)等引起的偶然误差,以及人在使用摄影机时造成的人为误差 (拍摄时由于抖动造成的影像模糊等),这类误差可以在标定过程中进行修正,来减小误差造成的结果差值过大[23];第二是在鱼类游泳过程中,姿态的变换,会引起图像中对目标鱼的距离判读出现误差,并且在水中和空气中对水中的鱼进行摄影,差别较大,因为空气中摄像要考虑光线的折射修正,较为繁琐,另外还要额外考虑相机的位置、角度,鱼类的姿态、角度等多方面因素,产生的误差较大[24]。摄影测量与人工测量的鱼体体长之间存在约2 cm的绝对值误差,并且这种误差与鱼体体长无关 (图8)。考虑系统偏差产生的原因,一种可能是由于人工测量的是鱼死亡后的长度造成的,另外也可能由于鱼在游泳时姿态变化造成的几何弯曲而造成的。
综上所述,摄影测量法是基于几何形态测量学等方法的综合应用,可作为鱼类研究的重要手段,将来在鱼类个体测量、泳速测量、鱼群研究等方面会有广阔的应用前景。今后,会对摄影设备进行进一步改进,减少由电子元件引起的误差;同时研究如何加强鱼体控制点的提取,减少摄影偏差,使摄影测量法更好地应用于鱼类行为的研究中。
参考文献:
[1] Trudel M,Boisclair D.Estimation of fish activity costs using underwater video cameras[J].Journal of Fish Biology,1996,48(1):40-53.
[2] De Girolamo M,Mazzoldi C.The application of visual census on Mediterranean rocky habitats[J].Marine Environmental Research,2001,51(1):1-16.
[3] Kim Y H,Wardle C S,An Y S.Herding and escaping responses of juvenile roundfish to square mesh window in a trawl cod end[J].Fisheries Science,2008,74(1):1-7.
[4] 王之卓.摄影测量原理续编[M].武汉:武汉大学出版社,2007.
[5] Cuesta E,Álvarez B J,Sánchez-Lasheras F,et al.Feasibility evaluation of photogrammetry versus coordinate measuring arms for the assembly of welded structures[J].Advanced Materials Research,2012,498:103-108.
[6] 范亚兵,黄桂平,范亚洲,等.水下摄影测量技术研究与实践[J].测绘科学技术学报,2011,28(4):266-269.
[7] Sánchez-Lasheras F,Fernández R I,Cuesta E,et al.Study of the technical feasibility of photogrammetry and coordinated measuring arms for the inspection of welded structures[J].AIP Conference Proceedings,2012,1431(1):311-318.
[8] 吴中平,吴乔,韩召,等.利用高速摄影测量水下物体的运动速度[J].水雷战与舰船防护,2007,15(1):21-23.
[9] Weng J,Cohen P,Herniou M.Calibration of stereo cameras using a non-linear distortion model(CCD sensory)[C]//Proceedings of the 10th International Conference on Pattern Recognition.Atlantic City,NJ,USA:IEEE,1990:246-253.
[10] 张广军.视觉测量[M].北京:科学出版社,2008.
[11] 吴福朝.计算机视觉中的数学方法[M].北京:科学出版社,2008.
[12] Tsai R.A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses[J].IEEE Journal on Robotics and Automation,1987,3(4):323-344.
[13] Tsai R Y.An efficient and accurate camera calibration technique for 3D machine vision[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition.Miami Beach,FL,USA:IEEE,1986:364-374.
[14] Zhang Zhengyou.Flexible camera calibration by viewing a plane from unknown orientations[C]//Proceedings of the Seventh IEEE International Conference on Computer Vision.Kerkyra,Greece:IEEE,1999:666-673.
[15] 靳志光,卫建东,张冠宇,等.基于LCD的相机标定新方法[J].遥感信息,2008(1):87-90.
[16] Meng Xiaoqiang,Hu Zhanyi.A new easy camera calibration technique based on circular points[J].Pattern Recognition,2003,36(5):1155-1164.
[17] 徐德,赵晓光,涂志国,等.基于单特征点的手眼系统摄像机标定[J].高技术通讯,2005,15(1):32-36.
[18] 周应祺.应用鱼类行为学[M].北京:科学出版社,2011.
[19] Lauterborn T J.American society of photogrammetry[J].The Professional Geographer,1984,36(3):372.
[20] 周碧云,吕国庆,李思发.淡水养殖鱼类体长的测量方法[J].上海水产大学学报,1995,4(2):147-151.
[21] 林宗坚,崔红霞,孙杰,等.数码相机的畸变差检测研究[J].武汉大学学报:信息科学版,2005,30(2):122-125.
[22] 熊鹰,张敏,张欢,等.鱼类形态特征与营养级位置之间关系初探[J].湖泊科学,2015,27(3):466-474.
[21] 侯刚,王学锋,朱立新,等.基于几何形态测量学的4种金线鱼矢耳石识别研究[J].海洋与湖沼,2014,45(3):496-503.
[23] 武彩萍,王瀚,白宝丹,等.基于图像的3D场景重建[J].云南大学学报:自然科学版,2007,29(S1):98-100,104.
[24] 李擎,何东钢,李响.基于水下三维结构光的视觉测量方法研究[J].大连海洋大学学报,2012,27(6):583-586.